The objective of Lab 8 is to be able to conduct one of two stunt. The two stunts we can choose from is a drift of about 3 ft from a wall or object or a flip from that same distance. This lab combines the Kalman filter made in lab 7, the PID controller from lab 5, and the motor design from lab 4 and the TOF sensors from lab 3 to allow our robot to conduct a basic stunt. The stunt I decided to work on was the Drift.
When practicing at home, used pillows, empty bookbadgs, and other soft objects to ensure safety of the robot.
My code for this lab is relaively simple compared to the expectation of using the Kalman filter from lab 7. I tried to use my Kalman Filter but I was running into major issues and bugs that I did not iron out in the pervious lab so I opted to use linear extrapolation as its subsitute. It was a simple section of code that kept track of velocity and a predicted distance as seen in this code snippet:
int velocity = currentDistance - lastDistance;
int predictedDistance = currentDistance + velocity;
Thus in turn lead to me using:
if(predictedDistance <= 300){
Serial.println(" Entered drift seq");
analogWrite(MotorPin1, 250);
analogWrite(MotorPin2, 0);
analogWrite(MotorPin3, 0);
analogWrite(MotorPin4, 255);
delay(250);
analogWrite(MotorPin1, 0);
analogWrite(MotorPin2, 0);
analogWrite(MotorPin3, 0);
analogWrite(MotorPin4, 0);
} else{
Serial.println(" Entered drive straight seq");
analogWrite(MotorPin1, 80);
analogWrite(MotorPin2, 0);
analogWrite(MotorPin3, 75);
analogWrite(MotorPin4, 0);
}
To arrive to this code I had various runs that were massive failures as seen below:
In the end I was able to capture a run that although is not perfect shows that the robot can drift and react after an intial drift as seen below:
If interested a graph of this run is shown here:
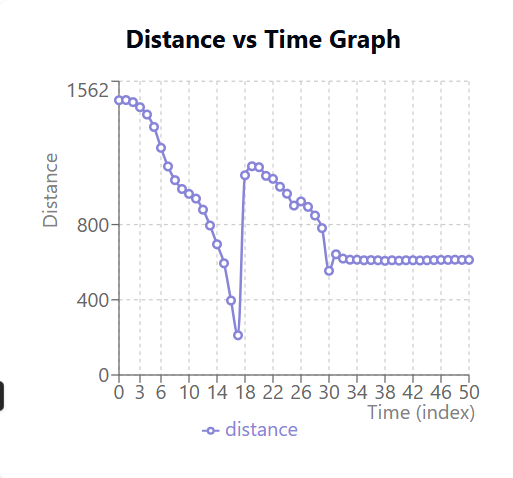
Note: I did not include graphs of the other runs since they were not good enough runs to consitute gathering distance data from them.